如果你需要精确控制设备的转动角度,普通电机是做不到的,通常我们会选用步进马达。比如28BYJ-48这个型号的,很容易买到。

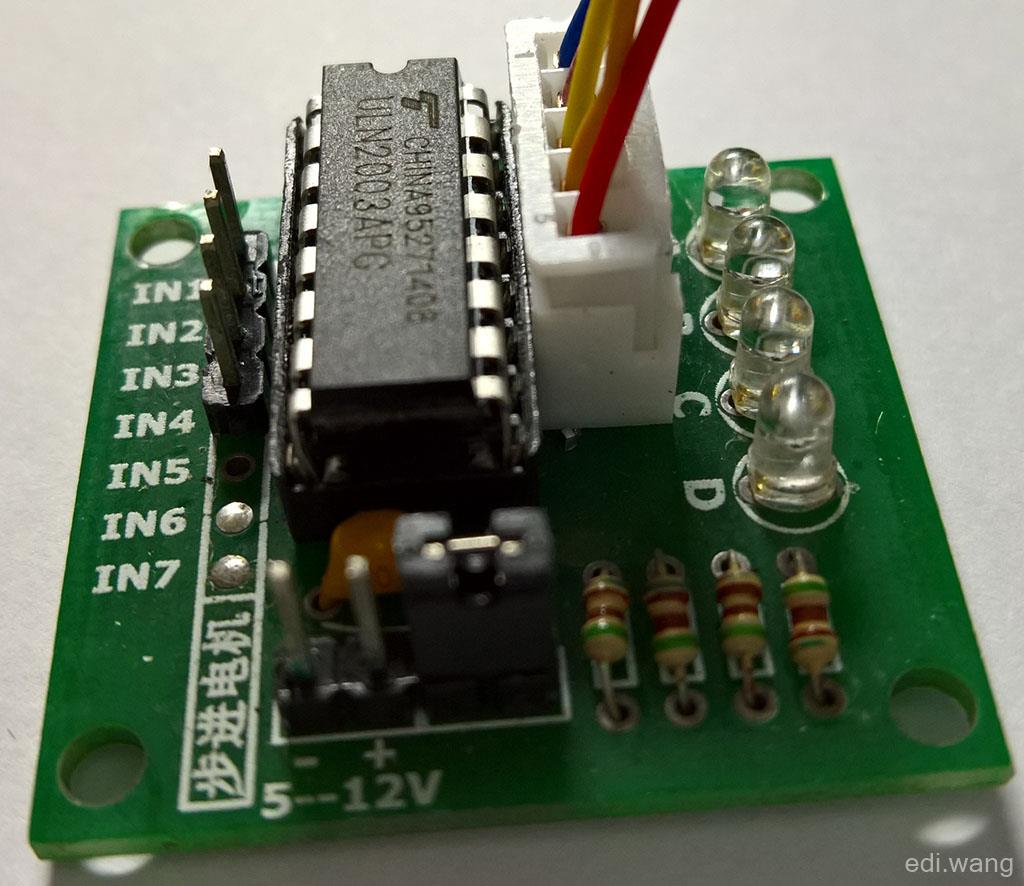
步进马达得配合驱动板使用,最常用的是ULN2003芯片的驱动板,就像下图。不过注意,你买到的驱动板长相可能不太一样,不过没关系,只要芯片上写的是ULN2003,就可以使用,它们的接口都是一样的。关于步进马达的原理,可以看这篇: https://en.wikipedia.org/wiki/Stepper_motor
拿到驱动板和步进马达后,将马达插入驱动板的白色插槽中,这个接口有防呆设计,所以不会插反。
关于Windows 10 IoT如何驱动步进马达,有一篇很好的英文材料:
https://www.hackster.io/erickbp/stepper-motor-and-windows-10-iot-core-d3c5d6
我的例子就是基于上面这篇文章的改进和补充。
一、物理连接
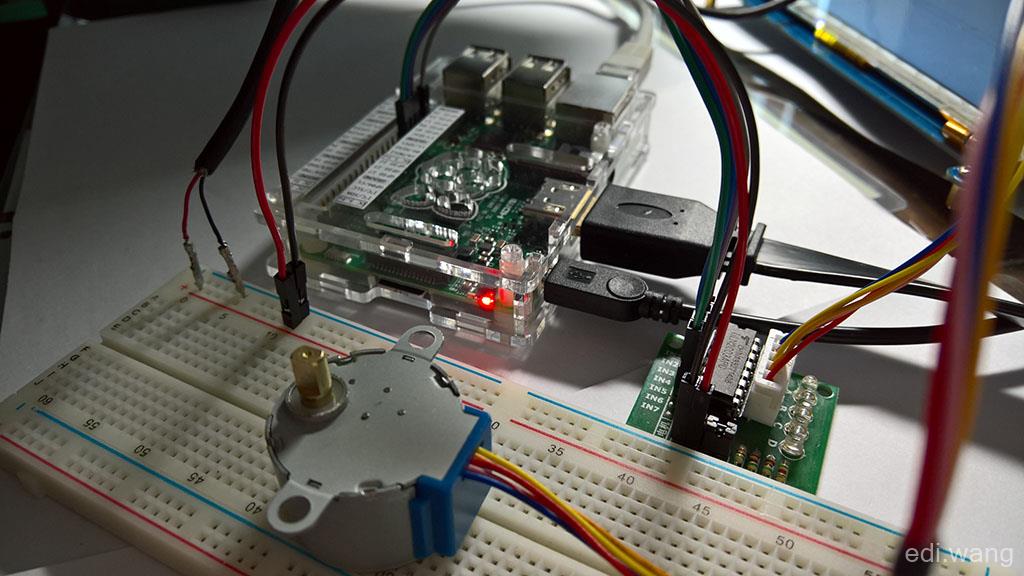
首先,不建议把步进马达驱动板的5v电源接入树莓派的5v输出,运行时侯树莓派会报电压不足的提示的,如果你还有别的什么设备连接在树莓派上,很可能会导致机器重启。所以建议大家用外接的5v电源,正负极可以完全独立,负极是可以不接入树莓派的GND的,这和那篇英文资料里说的不太一样。不过我不清楚这样做会不会爆炸。反正我没爆。
我用的外接电源是一根废旧的USB鼠标线改的,USB的输出就是5v,最方便了。
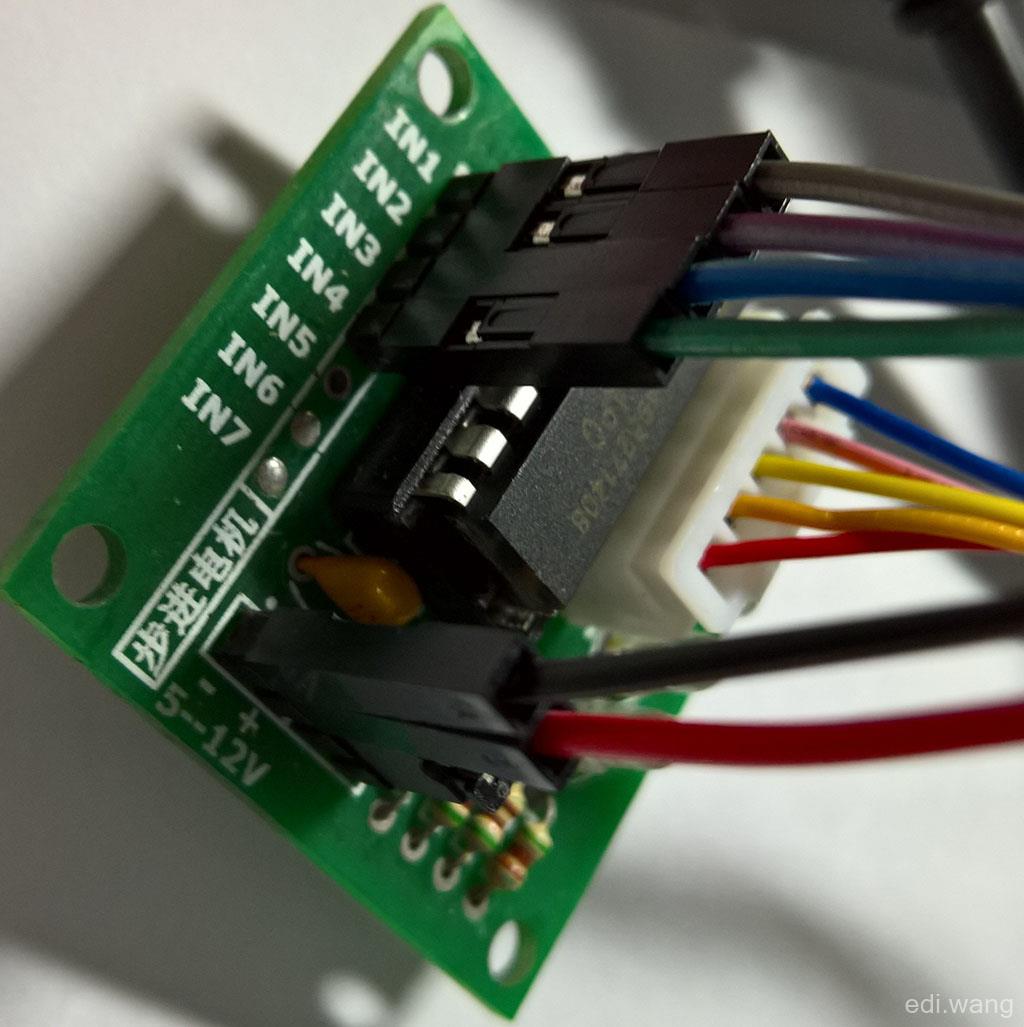
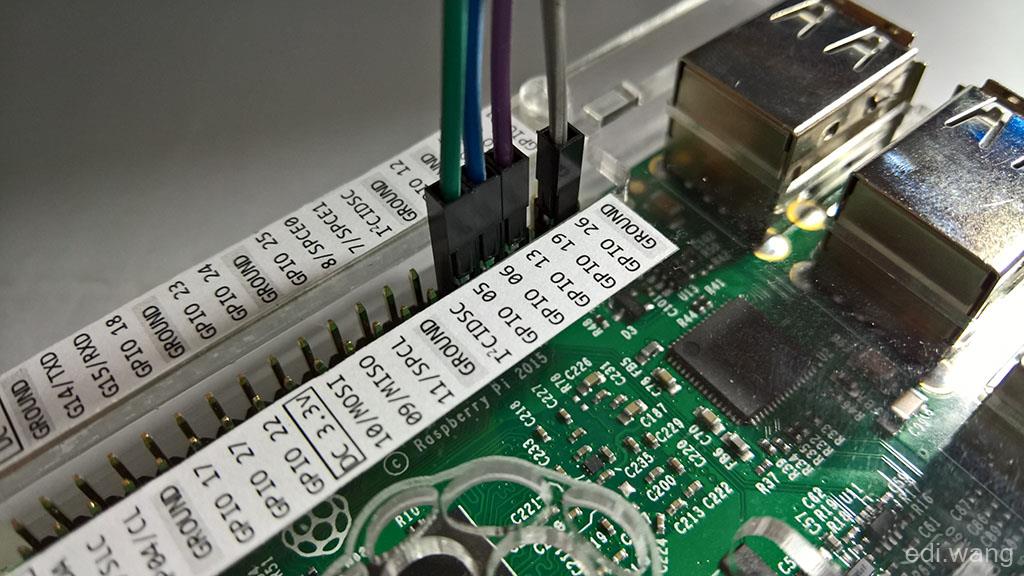
接好电源以后,使用4根杜邦线,把IN1-IN4接入树莓派的GPIO端口,对应关系如下(当然你可以自己改,程序也要做相应的修改):
| 驱动板端口 | 树莓派端口 |
|---|---|
| IN1 | GPIO 26 |
| IN2 | GPIO 13 |
| IN3 | GPIO 6 |
| IN4 | GPIO 5 |
驱动板端:
树莓派端:
二、爆代码
原版代码在这里:https://github.com/erickbp/IoT/blob/master/Stepper%20Motor/Stepper%20Motor/Uln2003Driver.cs
我做了一些改进。先贴出完整代码:
using System;
using System.Diagnostics;
using System.Threading;
using System.Threading.Tasks;
using Windows.Devices.Gpio;
namespace Uln2003StepMotor
{
public class Uln2003Driver : IDisposable
{
public int IntervalMs { get; set; }
private readonly GpioPin[] _gpioPins = new GpioPin[4];
private readonly GpioPinValue[][] _waveDriveSequence =
{
new[] {GpioPinValue.High, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low},
new[] {GpioPinValue.Low, GpioPinValue.High, GpioPinValue.Low, GpioPinValue.Low},
new[] {GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.High, GpioPinValue.Low},
new[] {GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.High}
};
private readonly GpioPinValue[][] _fullStepSequence =
{
new[] {GpioPinValue.High, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.High},
new[] {GpioPinValue.High, GpioPinValue.High, GpioPinValue.Low, GpioPinValue.Low},
new[] {GpioPinValue.Low, GpioPinValue.High, GpioPinValue.High, GpioPinValue.Low},
new[] {GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.High, GpioPinValue.High }
};
private readonly GpioPinValue[][] _halfStepSequence =
{
new[] {GpioPinValue.High, GpioPinValue.High, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.High},
new[] {GpioPinValue.Low, GpioPinValue.High, GpioPinValue.High, GpioPinValue.High, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low},
new[] {GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.High, GpioPinValue.High, GpioPinValue.High, GpioPinValue.Low, GpioPinValue.Low},
new[] {GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.Low, GpioPinValue.High, GpioPinValue.High, GpioPinValue.High }
};
public Uln2003Driver(GpioController gpioController,
int wireIn1, int wireIn2, int wireIn3, int wireIn4,
GpioSharingMode sharingMode = GpioSharingMode.Exclusive, int intervalMs = 5)
{
var gpio = gpioController ?? GpioController.GetDefault();
_gpioPins[0] = gpio.OpenPin(wireIn1, sharingMode);
_gpioPins[1] = gpio.OpenPin(wireIn2, sharingMode);
_gpioPins[2] = gpio.OpenPin(wireIn3, sharingMode);
_gpioPins[3] = gpio.OpenPin(wireIn4, sharingMode);
foreach (var gpioPin in _gpioPins)
{
gpioPin.Write(GpioPinValue.Low);
gpioPin.SetDriveMode(GpioPinDriveMode.Output);
}
IntervalMs = intervalMs;
}
public async Task TurnAsync(TurnDirection direction, CancellationToken ct,
DrivingMethod drivingMethod = DrivingMethod.FullStep)
{
bool stop = false;
GpioPinValue[][] methodSequence;
switch (drivingMethod)
{
case DrivingMethod.WaveDrive:
methodSequence = _waveDriveSequence;
break;
case DrivingMethod.FullStep:
methodSequence = _fullStepSequence;
break;
case DrivingMethod.HalfStep:
methodSequence = _halfStepSequence;
break;
default:
throw new ArgumentOutOfRangeException(nameof(drivingMethod), drivingMethod, null);
}
while (!stop)
{
for (var j = 0; j < methodSequence[0].Length; j++)
{
for (var i = 0; i < 4; i++)
{
_gpioPins[i].Write(methodSequence[direction == TurnDirection.Right ? i : 3 - i][j]);
}
// don't pass cancellation token, will blow up.
await Task.Delay(IntervalMs);
if (ct.IsCancellationRequested)
{
Debug.WriteLine("Cancel Requested, stop now.");
stop = true;
break;
}
}
}
Stop();
}
public async Task TurnAsync(int degree, TurnDirection direction, CancellationToken ct,
DrivingMethod drivingMethod = DrivingMethod.FullStep)
{
var steps = 0;
GpioPinValue[][] methodSequence;
switch (drivingMethod)
{
case DrivingMethod.WaveDrive:
methodSequence = _waveDriveSequence;
steps = (int)Math.Ceiling(degree / 0.1767478397486253);
break;
case DrivingMethod.FullStep:
methodSequence = _fullStepSequence;
steps = (int)Math.Ceiling(degree / 0.1767478397486253);
break;
case DrivingMethod.HalfStep:
methodSequence = _halfStepSequence;
steps = (int)Math.Ceiling(degree / 0.0883739198743126);
break;
default:
throw new ArgumentOutOfRangeException(nameof(drivingMethod), drivingMethod, null);
}
var counter = 0;
while (counter < steps)
{
for (var j = 0; j < methodSequence[0].Length; j++)
{
for (var i = 0; i < 4; i++)
{
_gpioPins[i].Write(methodSequence[direction == TurnDirection.Right ? i : 3 - i][j]);
}
// don't pass cancellation token, will blow up.
await Task.Delay(IntervalMs);
if (ct.IsCancellationRequested)
{
Debug.WriteLine("Cancel Requested, stop now.");
counter = steps;
}
else
{
counter++;
}
if (counter == steps)
{
break;
}
}
}
Stop();
}
public void Stop()
{
foreach (var gpioPin in _gpioPins)
{
gpioPin.Write(GpioPinValue.Low);
}
}
public void Dispose()
{
foreach (var gpioPin in _gpioPins)
{
gpioPin.Write(GpioPinValue.Low);
gpioPin.Dispose();
}
}
}
public enum DrivingMethod
{
WaveDrive,
FullStep,
HalfStep
}
public enum TurnDirection
{
Left,
Right
}
}
改进的地方是:
1. TurnAsync方法增加了CancellationToken,可以转动到一般的时候强制停止转动。
public async Task TurnAsync(int degree, TurnDirection direction, CancellationToken ct,
DrivingMethod drivingMethod = DrivingMethod.FullStep)
// don't pass cancellation token, will blow up.
await Task.Delay(IntervalMs);
if (ct.IsCancellationRequested)
{
Debug.WriteLine("Cancel Requested, stop now.");
counter = steps;
}
else
{
counter++;
}
2. TurnAsync增加一个重载,用途是不指定角度,不停的往一个方向转动。然后通过CancellationToken来停止。
public async Task TurnAsync(TurnDirection direction, CancellationToken ct,
DrivingMethod drivingMethod = DrivingMethod.FullStep)
使用方法:
XAML
<Button x:Name="BtnLeftForever" Content="Trun Left Forever" Click="BtnLeftForever_OnClick" /> <Button x:Name="BtnLeft90" Content="Turn Left 90" Click="BtnLeft90_OnClick" Margin="0,10,0,0" /> <Button x:Name="BtnRight90" Content="Turn Right 90" Margin="0,10,0,0" Click="BtnRight90_OnClick" /> <Button x:Name="BtnStop" Content="Stop" Margin="0,10,0,0" Click="BtnStop_OnClick"/> <TextBox Text="10" Header="Degree" x:Name="TxtDegree" /> <Button x:Name="TurnDegree" Click="TurnDegree_OnClick" Content="Trun Left" />
后台
public sealed partial class MainPage : Page
{
public CancellationTokenSource Cts { get; private set; }
public Uln2003Driver Uln2003Driver { get; set; }
public MainPage()
{
this.InitializeComponent();
var controller = GpioController.GetDefault();
Uln2003Driver = new Uln2003Driver(controller, 26, 13, 6, 5);
}
private async Task TurnMotor(int degree, TurnDirection direction)
{
Cts = new CancellationTokenSource();
await Uln2003Driver.TurnAsync(degree, direction, Cts.Token);
}
private async void BtnLeft90_OnClick(object sender, RoutedEventArgs e)
{
await TurnMotor(90, TurnDirection.Left);
}
private async void BtnRight90_OnClick(object sender, RoutedEventArgs e)
{
await TurnMotor(90, TurnDirection.Right);
}
private async void TurnDegree_OnClick(object sender, RoutedEventArgs e)
{
await TurnMotor(int.Parse(TxtDegree.Text), TurnDirection.Left);
}
private void BtnStop_OnClick(object sender, RoutedEventArgs e)
{
Cts.Cancel();
}
private async void BtnLeftForever_OnClick(object sender, RoutedEventArgs e)
{
Cts = new CancellationTokenSource();
await Uln2003Driver.TurnAsync(TurnDirection.Left, Cts.Token);
}
}
三、运行
终于换上了打印的阵脚标签
当初被一个不知道是坏的ULN2003弄到崩溃
我在TurnMotor()方法里最上面加了一行 if (Cts != null) Cts.Cancel(); 这样随便瞎按都没事啦
您好 很感谢您提供的例子,我在我专案的单一UWP页面上有成功的让步进马达转动 不过我在我的专案新增了第二个页面,从控制马达的页面跳到第二个页面在跳回原来的页面(控制马达的页面)时
系统出现了Exception并显示「Pin ' is currently opened in an incompatible sharing mode. Make sure this pin is not already in use by this application or another application.」的讯息
请问要如何修正这方面的错误?